I. Преглед на системот
1. Позадина на проектот
Во последниве години, нелегалниот транспорт на товарни возила на автопатишта стана сериозен проблем што ја загрозува безбедноста на националниот патен сообраќај. Ги преоптоварува автопатите и мостовите, значително го намалува нивниот век на траење; во исто време, безбедносниот фактор на возилата е значително намален, што постојано предизвикува сообраќајни несреќи; исто така, лесно се предизвикуваат сообраќаен метеж и загадување на животната средина.
Владите на сите нивоа низ целата земја континуирано ги зголемуваат своите напори за контрола на преоптоварениот транспорт на автопатски возила и постигнаа важни фазни резултати. Сепак, поради сложени социјални и економски фактори, националната ситуација со откривање на преоптоварување е сè уште многу сериозна, а скриените опасности од враќање на товарот не се елиминирани; консолидирањето на резултатите од управувањето и континуираното промовирање на работата за откривање на преоптоварување е сè уште под голем притисок. Затоа, управувањето со преоптоварениот транспорт на возила е долгорочна и секојдневна работа, која мора да се продолжи. Од клучно значење е управувањето со преоптоварената работа да се вклучи во долгорочен механизам. Исто така, игра правна улога за одвраќање на преоптоварените возила, а може да ги прошири и своите функции за да стане патна инспекција, да се справи со случајниот менталитет на нелегалните транспортни операции и навремена контрола и елиминирање на разни нелегални транспортни операции, вклучително и преоптоварениот транспорт.
2. Вовед во системот за мерење
Принципот на мерење на статичната вага за камиони е да ги паркира сите возила на платформата за мерење за да го измери целото возило. Таа има висока точност на мерење и јасни национални стандарди. Сепак, конвенционалната вага за камиони може да ја измери само тежината на целото возило, но не и тежината на оската. Може да процени дали целото возило е преоптоварено, но не може да процени дали тежината на оската е преоптоварена. Не може да ги исполни барањата на одделот за администрација на патишта за да се постигне целта за управување со преоптоварен транспорт.
Овој план ги комбинира долгогодишното искуство на нашата компанија во дизајнирање и производство на опрема за детекција на преоптоварување и нејзината реална примена во различни региони на земјата, внимателно ја проучува употребата на различна опрема за детекција на преоптоварување на пазарот и сеопфатно ги зема предвид специфичните потреби на одделенијата за управување со автопатишта за управување со преоптоварен транспорт. Усвојува напредна технологија и уникатни идеи за дизајн за да развие динамичен систем за детекција на тежината на возилото и типот на оската со висока прецизност. Може да ја мери и тежината на оската и вкупната тежина, и може да го разликува типот на оската. Точноста на тежината на оската, исто така, може значително да се подобри.
2. Состав на систем за преоптоварување и преограничување
1. Карактеристики на системот
Може да ги мери возилата што минуваат со мала брзина и автоматски да утврди дали тежината на возилото или тежината на оската е преоптоварена;
Може да го детектира бројот на оски, групата на оски, тежината на оските и тежината на возилото;
Може да формира комплетни информации за мерење на возилото, вклучувајќи тип на оска, тежина на оската, група на оски и вкупна тежина;
Може да пренесува информации за мерење на тежина до компјутерот преку интерфејсот за податоци;
Основниот дел од системот користи зрела и сигурна опрема, од кои сите имаат модуларен дизајн, лесна за одржување и проширување, обезбедувајќи висока сигурност на системот.
Системскиот софтвер е зрел, високо сигурен, податоците се комплетни и ефикасни и можат целосно да се споделуваат, ефикасно подобрувајќи ја работната ефикасност и елиминирајќи ги разните дупки во управувањето во најголема мера.
2. Системски процес
Камионот се внесува во лентата за мерење на станицата за преоптоварување, а системот за препознавање на регистарски таблички го идентификува бројот на регистарската табличка;
Идентификаторот на гумата (оската) го разликува бројот на оските, а системот за мерење на возилото почнува да мери, да ја одредува групата на оски и да ја пресметува тежината на оската.
Кога сите возила ќе поминат низ сепараторот за возила и ќе влезат на платформата за мерење, а вагата е во релативно избалансирана состојба, се евидентира вкупната тежина на возилото и се добива тежината на оската.
Системот за мерење на тежина испраќа информации за мерење на тежина (број на регистарска табличка, број на оски, тежина на оската, вкупна тежина на возилото итн.) до компјутерот за детекција. Компјутерот одредува дали е преограничено и ги прикажува информациите за детекција, како што се тежината на возилото, пречекорувањето на границата и стапката на пречекорување на границата на екранот.
Откако возилото ќе ги заврши соодветните операции, персоналот за водење на возилата ги пушта возилата без преограничување да ја напуштат зоната за детекција според информациите на екранот, ги насочува возилата со преограничување да влезат во зоната на станицата за обработка, го печати формуларот за проверка на возилата со преограничување и извршува соодветни операции за полнење;
3. Состав на системот и план за распоред
3.1 Состав на системот
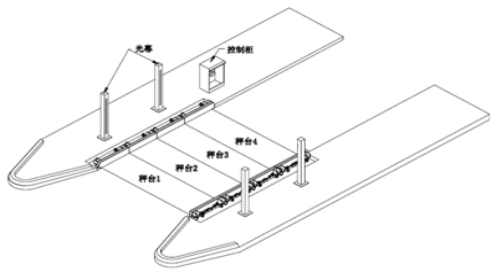
Системот за преоптоварување и преоптоварување се состои од вага за мерење на динамичка оска со четири маси ZDG, контролен инструмент, инфрацрвен сепаратор за возила, идентификатор на оска на тркалото на платформата за мерење, контролен кабинет (опционална опрема: систем за препознавање на регистарски таблички, LED систем за прикажување на голем екран, систем за гласовни инструкции, систем за водење на возилото, индустриски компјутер, печатач за билети, UPS непрекинато напојување, софтвер за систем за детекција на преоптоварување и преоптоварување, систем за следење) и други додатоци и кабли.
3.2 Дијаграм на распоред на системот како што е прикажано:
Работен тек:
1) Возилата влегуваат во лентата по ред додека одржуваат безбедно растојание, активирајќи го инфрацрвениот сепаратор на возила;
2) Секоја оска на возилото поминува низ платформата за мерење со повеќе површини;
3) Контролерот на екранот го обработува сигналот за мерење добиен од сензорот на платформата за мерење и сигналот од сензорот на тркалото, ја одделува оската според логичките услови и ефикасно се справува со посебни ситуации;
4) Задниот дел од возилото ја напушта платформата за мерење со повеќе површини и инфрацрвениот сепаратор на возила;
5) Контролерот на екранот сеопфатно го проценува сигналот за крај на возилото врз основа на сигналот за оклузија детектиран од инфрацрвениот сепаратор на возилото и сигналот за мерење добиен од сензорот за мерење;
6) Контролерот на дисплејот го обработува сигналот за мерење добиен кога гореспоменатото возило поминува низ платформата за мерење;
7) Контролерот на екранот формира комплетни информации за мерење на тежината на целото возило, а комплетните информации за мерење на тежината вклучуваат брзина на возилото, тип на оска, тежина на оската, тежина на групата на оските, вкупна тежина итн.;
8) Завршете го процесот на мерење на едно возило и почекајте мерењето на следното возило
9) Во текот на целиот работен процес, системот автоматски се справува со разни посебни ситуации, како што се целосен влез и целосен излез, повторен влез и излез и долг престој на платформата за мерење;
Системот може автоматски и ефикасно да се справи со следната ситуација со возилото, а мерењето на возилото по следниот пат нема влијание врз точноста на податоците.

Време на објавување: 20 февруари 2025 година